Виды судовых движителей. Крыльчатый движитель Движитель морской
При движении с некоторой скоростью V судно испытывает силу
сопротивления окружающей среды R (воды и воздуха), направленную в
сторону, противоположную его движению.
Гидродинамические силы, приложенные к элементам поверхности корпуса движущегося судна, можно разложить на две составляющие: касательную и нормальную.
Касательную составляющую называют силой трения, а нормальную - силой давления. На рисунке сила трения τ и сила давления Р действуют на выделенный элемент смоченной поверхности судна. Проецируя все элементарные силы трения на направление скорости
движения судна и суммируя их по всей смоченной поверхности, получим результирующую сил трения - сопротивление трения RТР, обусловленное действием сил вязкости.
Результирующая проекции сил давления на направление скорости движения
судна V, взятая по всей смоченной поверхности, определяет сопротивление давления RД, которое обуславливается плотностью и вязкостью воды.
Давления по поверхности судна распределяются неравномерно: в носовой
части они больше, в кормовой - меньше. Такой перепад давлений образует
сопротивление давления, которое в свою очередь разделяют на две части.
Первая часть - сопротивление формы RФ, вызванная влиянием вязкости жидкости, вторая -волновое сопротивление RB зависит от интенсивности волновых движений жидкости, вызванных движущимся судном.
Каждое судно имеет те или иные выступающие части (рули, кронштейны и
выкружки гребных валов, скуловые кили и т.п.). Сопротивление воды,
вызываемое ими, называют сопротивлением выступающих частей RВ.Ч.. Кроме того, судно испытывает воздушное сопротивление RВОЗ, распределенное по надводной поверхности движущегося судна.
Таким образом, полное сопротивление движению судна суммируется из следуюших составляющих:
R = RТР + RB + RФ+ RВ.Ч. + RВОЗ (1)
Для определения каждой составляющей полного сопротивления
применяются различные методы. Сопротивление трения определяется
расчетным путем на основании теории пограничного слоя. Сопротивление
формы и волновое сопротивление, объединенные под общим названием остаточного сопротивления Ro, определяются экспериментальными методами путем испытания моделей судов в опытовых бассейнах.
В практических расчетах полное сопротивление движению судна
вычисляется по формуле:
R = C × (ρπV2 / 2) × (S + SВЧ), (2)
где С - коэффициент полного сопротивления;
S - смоченная поверхность голого корпуса;
SВЧ - смоченная поверхность выступающих частей;
ρ - плотность воды;
V - скорость судна.
По аналогии с формулой (1) коэффициент полного сопротивления может быть представлен в виде суммы коэффициентов:
C = CТР + CB + CФ+ CВ.Ч. + CВОЗ или C = CТР + CО + CВ.Ч. + CВОЗ
где Со - коэффициент остаточного сопротивления.
Следовательно, полное сопротивление судна равно:
R = (CТР + CО + CВ.Ч. + CВОЗ) × (ρπV2 / 2) × (S + SВЧ) (3).
Движущая сила Pe создается и поддерживается судовыми движителями, преобразующими механическую энергию поступательного движения судна.
В процессе работы движитель воздействует на окружающий судно поток, а корпус судна изменяет поток в районе расположения движителя.
Полезная мощность, которую развивает движитель: N=Pvp
Поторебляемая движителем мощность Np=Mw
(М-момент, передаваемый движителю от двигателя, w-угловая скорость вращения гребного винта)
Судовые движители по принципу действия являются гидравлическими или гидрореактивными. В последнее время применяются воздушные движители (суда на воздушной подушке оборудуют воздушными винтами).
Действие основано на отбрасывании в сторону, обратную направлению движения судна, масс окуржающей среды: воды или воздуха. Это осуществляется засчет сообщения массам, перерабатываемым рабочими элементами движителяколичества движения. Реакция отброшенных масс воспринимается деталями движителя. Ее составляющая в направлении движения судна ности назвоние упора движителя. Силы, возникающие на элементах движителей, могут создаваться как за счет сил сопротивления при движении движителя в окружающей среде, так и за счет подъемной силы- по природе аналогичной подъемной силе несущего крыла.
Гребные винты применяются на судах различного типа и назначения, они отличаются простотой конструкции, удовлетворительной эксплуатационной надежностью и относительно высоким КПД. Разновидностями гребного винта являются винты регулируемого шага, соосные винты противоположного вращения,гребные винтытандем.
Крыльчатый движитель обладает специфическими свойствами.
Водометные движители
Существуют другие типы движителей, среди которых можно отметить газоводометные и роторные.
Судовыми движителями называются специальные устройства, которые преобразуют энергию главных двигателей в движущую силу (полезную тягу), необходимую для преодоления сопротивления среды движению судна и обеспечения заданной скорости его движения.
По принципу действия судовые движители являются гидрореактивными, т.к. они создают движущую силу за счет реакции масс воды, отбрасываемых рабочими деталями движителя - лопастями - в сторону, противоположную движению судна. В настоящее время на водном транспорте применяются следующие основные типы судовых движителей: гребной винт, гребное колесо, крыльчатый и водометный движители. Гребной винт служит основным типом движителя
для морских судов. Он состоит из нескольких лопастей, расположенных на ступице на одинаковых угловых расстояниях друг от друга. Число лопастей гребных винтов колеблется от 2 до 6. В целях предотвращения вибраций кормовой оконечности одновинтовых судов, число лопастей гребного винта принимают не менее четырех. Диаметр гребных винтов крупных современных судов достигает 6 - 8 м.
Различают три основных конструктивных типа гребных винтов: цельные винты (цельнолитые), винты со съемными лопастями (сборные) и винты с поворотными лопастями - винты регулируемого шага (В Р Ш). Гребной винт характеризует его шаг. Шагом винта называется расстояние, на которое переместится точка винта за один полный оборот винта при вращении его в абсолютно твердом теле. Гребные винты, в зависимости от того, в какую сторону они вращаются, бывают левого и правого шага. В отличие от лопастей В Ф Ш у винтов регулируемого шага лопасти могут поворачиваться вокруг своей продольной оси и изменять шаг, что обеспечивает возможность использования полной мощности двигателя при оптимальной частоте вращения на любом режиме движения судна. Расчет гребного винта заключается в определении его геометрических характеристик (диаметра, шага, дискового отношения и числа лопастей), обеспечивающих наиболее высокие пропульсивные качества судну в основном режиме его эксплуатации. Так, транспортному судну указанные характеристики должны обеспечить наивысшую скорость, буксирному - наибольшую тягу на гаке при полном использовании мощности главных двигателей.
Преимущества и недостатки В Р Ш по сравнению с обычным винтом: возможность изменять положение лопастей у В Р Ш позволяет изменять силу упора винта не меняя частоты и направления вращения вала с полного переднего хода до нуля, а затем до полного заднего хода. Это позволяет использовать на судне нереверсивный двигатель, который проще в обслуживании и моторесурс которого значительно выше реверсивного. За счет того, что нет необходимости выполнять реверс для изменения силы упора винта, а достаточно только развернуть лопасти винта, что делается дистанционно с мостика, время перехода судна от одного режима движения к
другому значительно сокращается. Это улучшает маневренные качества судна, упрощает эксплуатации двигателя. Но В Р Ш значительно сложнее по конструкции, что уменьшает его надежность и увеличивает стоимость. В Р Ш имеют при том же К П Д больший вес и размеры, чем обычные винты, что усложняет их крепление.
К основным геометрическим элементам и характеристикам, определяющим действие гребного лодочного винта, относятся:
1. Диамерт
винта D=2R, представляющий собой диаметр окружности, описываемой самой удаленной от оси винта точкой лопаси. Диаметр лодочного винта определяется площадью гидравлического
, или рабочего
, сечения движителя.
2. Радиус
лодочного винта R=0,5D - расстояние от оси гребного винта до наиболее удаленной точнки, называемой краем
лопасти.
3. Геометрический
, или конструктивный
, шаг винта - H, характеризующий возможное перемещение винта за один оборот при движении бе скольжения. Конструктивный шаг винта определяется шагом винтовых линий, образующих нагнетательную (кормовую) поверхность лопасти гребного лодочного винта, и находится по формуле: H=2πrtgѵ,
где r - радиус рассматриваемого сечения лопасти; tgѵ - тангенс шагового угла на радиусе r.
Различают лодочные винты постоянного шага
H = const и переменного
H = ϝ(r), у которых шаг вдоль радиуса лопасти изменяется по какому-либо закону.
4. Конструктивное шаговоре отношение
H/D - отношение конструктивного шага винта к его диаметру.
5. Дисковое отношение
Θ, представляющее отношение суммарной площади всех z лопастей к площади диска, ометаемого винтом, Θ=A/Ad=(2zbcp(D-dc))/(πDD),
6. Приведенный
, или относительный
, радиус лопасти, представляющий собой отношение радиуса ента давления лопасти R0 к наибольшему радиусу гребного винта R. Обычно принимается, что центр давления, характеризующий точку приложения к лопасти равнодействующей всех сил, совпадает с центром тяжести спрямленной поверхности лопасти.
7. Профиль сечения лопасти
, под которым понимается спрямленный на плоскость след сечения лопасти лодочного винта соосным с ним круговым цилиндром на заданном радиусе.
Для характеристики режима работы гребного винта в целом используют понятие поступи. Линейной поступью hp винта называется путь, проходимый винтом в осевом направлении за время одного оборота=vp/hp
Отношение линейной поступи к диаметру винта называется относительной поступью или просто поступью винта. λp=hp /D=Vp/nD
Шаг винта- расстояние, которое проходит винт за один оборот в твоердом теле.
Безразмерные гидродинамические характеристики гребного винта, представленные в виде кривых в функции от относительной поступи, называются кривыми действия. С их помощью можно определить упор, момент, КПД винта при различных режимах работы.
На графике изображается также λ1=H1/D- шаговое отношение нулевого упора или гидродинамическое шаговое отношение.
λ2=H2/D- шаговое отношение нулевого момента.
При λp ›λ2, k2‹ 0, винт работает в режиме турбины, создавая вращающий момент за счет энергии потока.
В диапозоне изменения относительной поступи λ1 ‹ λp‹ λ2 винт не может быть использован ни как движитель, ни как турбина. Рабочей областью гребного винта, как судового движителя является диапозон относительных поступей 0 ‹ λp ‹ λ1, где P› 0
В каждом конкретном случае на расчетных режимах гребной винт должен работать в диапозоне относительных поступей, соответствующих высоким значениям КПД, что обеспечивается надлежащим выбором геометрических характеристик гребных винтов.
Одна из наиболее важных целей модельных гидродинамических испытаний винтов- получить систематизированные экспериментальныематериалы, необходимые для проектирования гребных винтов. Эти материалы получают в результате испытаний определенных серий винтов. При разработке серий моделей стремятся получить систематическое изменение их важнейших конструктивных элементов, существенно влияющихна гидродинамические характеристики винта.
Такими элементами являются: шаговое отношение H/D, дисковое отношение A/Ad, число лопастей Z, относительная толщина лопасти Ω, форма сечений лопасти, ее контур.
Материалы испыьаний представляются на диаграммах, содержащих кривые действия винтов серии, отличющихся только шаговым отношением. На диаграмме изображаются кривые коэффициента упора К1 и КПД в функции относительно поступи.
Каждая серия винтов, отличающихся шаговым отношением, представляется двумя диаграммами: диаграммой, посторенной в осях k1-λp и диаграммой, построенной в осях k2- λp.
Первую диаграмму называют корпусной, она используется, когда исходными для расчета гребного винта служит буксировочное сопротивление корпуса судна, а мощность энергетической установки, необходимая для обеспечения указанной в техническом задании на проектировании скорости судна. Диаграмму, построенную в осях k2- λp, называют машинной. Эта диаграмма используется, когда мощность энергетической установки проектируемого судна задана, а достежимая скорость является искомой величиной.
Простейшей формой задания на проектирование винта, позволяющей однозначно определить геометрические элементы винта в пределах заданной серии, является случай, когда указаны частота вращения n, диаметр винта D, скорость поступательного движения винта Vp, а также требуемый упор или располагаемая мощность на винте Np. Ная эти величины, можно вычислить относительную поступь λp и коэффициент упора k2, определяющие на поле диаграмм единственную точку, которая однозначно определяет шаговое отношение и КПД винта.
Чтобы судно могло двигаться с постоянной скоростью, к нему нужно приложить движущую силу, равную силе сопротивления при этой скорости и противоположно направленную. В отдельных случаях эта сила создается буксированием, но чаще всего - специальными устройствами, которые называются судовыми движителями
.
В соответствии со сложившимися традициями термин «судовые движители», как и ряд других подобных, означает как указанные устройства, так и науку (раздел теории корабля), их изучающую.
Судоходство на Земле существует уже несколько тысячелетий, но во времена парусных (и весельных) судов науки о ходкости судов не было. Скорость парусных судов зависела от скорости ветра, для гребных судов также не требовались какие-либо расчеты. Настоятельная необходимость выполнения расчетов ходкости возникла лишь тогда, когда на судах стали применяться механические двигатели (паровые машины).
Видимо, первыми движителями, которые использовались на плотах и подобных им простейших плавсредствах, были шест и весло. Суда древности были преимущественно весельными, причем у крупнейших из них весла располагались в три ряда, их общее число достигало 300, длина - 15 м, на одном весле работало до 7 чел. Скорость таких судов была около 5 уз. Пика своего расцвета весельные суда достигли много веков назад. В настоящее время весла используются в качестве основного движителя лишь на спортивных судах, рабочих и спасательных шлюпках и других мелких судах.
Другим древним движителем был парус, иногда в комбинации с веслами. Парусные суда оказались более совершенными, они использовали энергию внешней среды - воздуха, не требуя размещения большого числа гребцов. Первые парусники могли двигаться по ветру, но по мере совершенствования парусного вооружения люди научились, двигаясь галсами, перемещаться в требуемом направлении, независимо от направления ветра. Наивысшего расцвета парусные суда достигли примерно в конце 19 в., их скорость при благоприятном ветре достигала 20 уз. Но появление и развитие механических установок на судах привело к постепенному переходу от парусных судов к пароходам. Парус сохранился на спортивных, учебных судах в качестве основного, на промысловых, некоторых исследовательских и т. п. судах - в качестве вспомогательного движителя.
В последние десятилетия в мировом судостроении наблюдается рост интереса к парусам как основному или, чаще, дополнительному типу движителей. Этот интерес обусловлен двумя главными причинами: возможностью экономии топлива при высоких ценах на него и экологической чистотой. Применение парусного вооружения позволяет значительно уменьшить мощность главного двигателя (дизеля) без существенной потери скорости. Достижения современной науки позволяют механизировать установку и уборку парусов, управление ими с целью получения наивысшей скорости хода в требуемом направлении, снизить массу при достаточной прочности и долговечности. В различных судостроительных странах, а также в России и Украине, выполнены разработки парусного вооружения судов, в том числе большого водоизмещения, однако о широком использовании парусов на транспортном флоте говорить преждевременно.
В глубокой древности, еще до нашей эры, было изобретено гребное колесо, которое приводилось во вращение животными (быками). Но колесные суда были вытеснены парусными. На новом уровне гребные колеса возродились в самом начале 19 в. (на судне «Клермонт» в 1802 г.; в России первым парусным судном считается построенная в 1815 г. «Елизавета»). Первые гребные колеса имели обод и неподвижные лопасти - плицы; КПД колес был сравнительно мал, глубина погружения -в несколько раз меньше диаметра. В 1829 г. было предложено колесо с поворотными плицами, что позволило повысить КПД и уменьшить диаметр колес; повышение оборотов двигателей (паровых машин) ведет к уменьшению их размеров.
Наиболее распространенный, эффективный и сравнительно простой движитель - гребной винт
. Идея судового гребного винта в виде шнека, подобно применявшемуся в древности винту Архимеда (для перекачки жидкостей), впервые возникла у Леонардо да Винчи в 15 в., но в ту пору она не нашла применения. В 1752 г. винт в виде двухзаходного червяка предложил Д. Бернулли, но КПД такого движителя оказался невелик. Как указывают в литературе, случай помог усовершенствовать конструкцию винта: одно судно, оборудованное деревянным винтом, коснулось им грунта, значительная часть винта отломилась и всплыла, но, к удивлению экипажа судна, оно увеличило ход. С тех пор было предложено множество усовершенствований винтов. Менялись их размеры, формы контура и сечений лопастей и другие характеристики. Некоторые усовершенствования продолжают появляться до сих пор.
В середине 17 в. появились первые водометные движители. Водометный движитель представляет собой систему водопроточных каналов (в частном случае - один канал), расположенных внутри корпуса судна, по которым перемещается забортная вода с помощью специального насоса, чаще всего осевого (винт в трубе). С помощью заслонок поток воды направляется в те или иные каналы (в случае одного канала изменяется направление движения струи, выходящей из канала в корме), что позволяет изменять направление движения судна.
К характерным особенностям водометных движителей можно отнести хорошую защищенность рабочего органа (расположенного в канале внутри корпуса; входное отверстие канала снабжено решеткой, которая препятствует попаданию крупных предметов в канал) и прекрасные маневренные качества (возможность двигаться передним и задним ходом, разворачиваться почти на месте благодаря соответствующей установке заслонок). Но эти движители отличаются большой массой (в которую входит система водопроточных каналов с водой внутри корпуса), занимают большой объем, затрудняя размещение полезного груза, обладают сравнительно невысоким КПД. Строго говоря, КПД водометного движителя - понятие достаточно условное, поскольку упор такого движителя создается на корпусе и не всегда удается точно разделить силы сопротивления и упора. Грубо ориентировочно, КПД обычного водометного движителя может составлять примерно 30 %.
Долгое время водометные движители мало применялись на судах. Считалось, что область их применения ограничивается сравнительно тихоходными судами, плавающими на мелководном или засоренном фарватере (например, такие суда использовались на лесосплаве). Но примерно с середины XX в. их популярность стала возрастать. Этому способствовали два обстоятельства. Во-первых, вместо развитой системы водопроточных каналов было предложено устраивать один короткий канал в кормовой оконечности судна, обеспечивая управление судном с помощью заслонок, отклоняющих струю движителя в нужную сторону. Во-вторых, было показано, что КПД водометного движителя на быстроходных судах может достигать 60 % и более, тогда как у обычных гребных винтов в этих условиях он может снижаться из-за кавитации.
Сравнительно недавно был предложен своеобразный водометный движитель для подводных лодок, торпед и других плавучих объектов, имеющих кормовую оконечность в форме тела вращения. Этот движитель представляет собой ряд лопастей, вращающихся вместе с кольцом, установленным заподлицо с наружной обшивкой. Снаружи установлено кольцо типа направляющей насадки; от гребного винта в насадке эта конструкция отличается тем, что винт в насадке располагается за пределами корпуса.
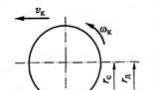
Около 1930 г. были предложены крыльчатые движители. Эти движители состоят из барабана, установленного внутри корпуса заподлицо с днищем и имеющего вертикальную или почти вертикальную ось вращения, и нескольких лопастей, расположенных по окружности барабана. При вращении барабана лопасти совершают колебательные движения, в результате чего создается упор, направление которого может быть произвольным, а величина - изменяться от нуля до максимального значения.
Крыльчатый движитель одновременно является прекрасным средством управления. Судно, оборудованное двумя крыльчатыми движителями, расположенными в оконечностях, может двигаться передним или задним ходом, лагом, разворачиваться на месте. Но такой движитель сравнительно сложный и громоздкий, требует наличия протяженного участка плоского днища в районе установки, неудобен подвод мощности к нему, при скоростях свыше 20 уз возникает кавитация. КПД крыльчатого движителя меньше, чем гребного винта.
Новые, иногда довольно экзотические конструкции судовых движителей продолжают появляться до сих пор. Среди наиболее известных можно назвать магнитогидродинамический
(МГД) движитель, имеющий канал, окруженный магнитной обмоткой, по которой течет постоянный ток. Как известно из физики, катушка с током выталкивает расположенный внутри нее проводник, каким является морская вода. Реакция отбрасываемой струи движет судно вперед.
Разработкой МГД-движителей занимаются в ряде стран, например в Японии. Наиболее серьезные проблемы связаны со слабой проводимостью морской воды, что требует использования сверхпроводящих обмоток. КПД испытанных моделей МГД-движителей крайне мал, он не достигает 10 %. К преимуществам таких движителей можно отнести прямое преобразование электроэнергии в движение (не требуется двигатель), отсутствие движущихся частей, малую шумность.
Прямое преобразование электроэнергии в движение потока воды осуществляется также в электрогидравлическом движителе. Внутри расширяющейся к корме трубы имеется своеобразный отражатель с отверстиями для прохода воды и определенным образом расположенными электродами, между которыми возникают электрические разряды. Вода выталкивается из преобразователя в корму, через отверстия поступает новая, и процесс повторяется, причем движение получается почти непрерывным.
Для подводных лодок был предложен роторный движитель, состоящий из обода, расположенного в плоскости шпангоута в средней части корпуса и имеющего большое количество лопастей. Заметим, что подобный движитель с насадкой выше назван как разновидность водометного движителя. Лопасти имеют возможность поворачиваться (наподобие винта регулируемого шага, но за время одного оборота ротора углы их установки могут изменяться). Такие движители называют движителями с циклической перекладкой лопастей. Роторов на судне должно быть не меньше двух, вращающихся в разные стороны, иначе появляется большой крутящий момент, передаваемый на корпус в виде кренящего. При этом лодка может двигаться с различными скоростями, маневрировать в горизонтальной и вертикальной плоскостях без установки вертикальных и горизонтальных рулей, что уменьшает сопротивление выступающих частей.
Известен также своеобразный способ движения по воде - с помощью одного или нескольких колес, катящихся по воде («суда на колесах»). Колеса делаются гладкими и лишь незначительно погружаются в воду. Такой способ движения в какой-то мере подобен глиссированию, причем, как считают специалисты, он может быть достаточно эффективным с гидродинамической точки зрения.
В начале 20 в. появились башенные движители («роторы Флеттнера
») в виде цилиндрических башен с вертикальной осью вращения, которые приводились во вращение маломощными двигателями, установленными под верхней палубой. Принцип работы ротора Флеттнера основан на эффекте Магнуса, который заключается в появлении подъемной силы на цилиндре, вращающемся в потоке жидкости или газа. Величину этой силы можно рассчитать по формуле Жуковского:
где р - плотность среды (воздуха); v - скорость набегающего потока (ветра); Г - циркуляция скорости на контуре профиля (цилиндра), в данном случае равная произведению длины окружности ротора на линейную скорость его поверхности; l - длина (высота ротора).
Упор ротора направлен перпендикулярно скорости ветра. Эти движители эффективнее парусов (мощность двигателя в десятки раз меньше мощности, «извлекаемой из воздуха»), но не могут убираться, чем представляют опасность при сильном ветре.
Известный советский кораблестроитель профессор В. Г. Павленко предложил устанавливать по бортам судна специальные плавники, получившие название «плавники Павленко», которые являются вспомогательным средством движения. При плавании на волнении, когда скорость судна снижается из-за увеличения сопротивления и других причин, плавники, изгибаясь от давления воды, обусловленного бортовой качкой, создают дополнительный упор, увеличивая скорость судна. Такие плавники, насколько нам известно, не получили распространения на флоте, но управляемые крылья, устанавливаемые в районе скул в средней части многих судов с целью уменьшения бортовой качки, способствуют и некоторому увеличению скорости хода на волнении.
Этот обзор не претендует на полноту, но позволяет судить о том, насколько разнообразны могут быть судовые движители. Предлагалось множество других конструкций, некоторые из них были осуществлены практически, преимущественно на небольших судах или плавучих средствах и в единичных экземплярах, другие же существовали только на бумаге.
Долгое время характеристики судовых движителей не рассчитывались, а выбирались по опыту, на глазок. Для парусных судов проблемы расчета парусов вообще не существовало: скорость судна зависела от скорости и направления ветра. Но с появлением паровых машин возникла необходимость в выполнении расчетов ходкости с определением и сопротивления движению, и характеристик движителей, которые должны были соответствовать установленным двигателям. Первая теоретическая работа, посвященная расчету гребного весла, была опубликована Л. Эйлером в его книге «Полное умозрение строения и вождения кораблей» в 1778 г. Весла, рассмотренные Л. Эйлером, отличались своеобразием конструкции и принципа действия. Около 1865 г. англичане Ранкин и Фруд создали теорию идеального движителя, с основными положениями которой мы скоро познакомимся. В начале 20 в. (примерно в период 1910-1920 гг.) появилось несколько теорий, относящихся к гребным винтам. Среди них можно назвать паральную теорию (российский профессор Брикс, 1914-1922 гг.), струйную теорию, в создание которой внесли вклад также отечественные ученые Джевецкий, Рузский, Сабинин, Юрьев. Наиболее известной и совершенной явилась вихревая теория гребного винта, созданная «дедушкой русской авиации» Н.Е. Жуковским в 1912-1918 гг. В последующие годы теория судовых движителей развивалась по многим направлениям, которые мы не рассматриваем. Назовем лишь вопросы взаимодействия винта и корпуса, проблемы кавитации гребных винтов, работу винтов в неравномерном потоке, винты регулируемого шага и в насадках.
§ 13. Судовые движители
Движителями называются специальные устройства, преобразующие механическую работу судовой силовой установки в упорное давление, преодолевающее сопротивления и создающее поступательное движение судна.На судах в качестве движителей применяются: гребные винты, крыльчатые движители и водометные движители. Находят применение также паруса, гребные колеса и другие движители.
По принципу действия движители разделяют на активные, к которым относят паруса, непосредственно преобразующие энергию ветра в поступательное движение судна, и реактивные - все остальные, так как создаваемое ими упорное давление получается в результате реакции масс воды, отбрасываемой в сторону, противоположную движению судна.
Наиболее распространенными благодаря простоте устройства и работы, компактности, надежности в эксплуатации и наибольшему коэффициенту полезного действия являются гребные винты. В зависимости от конструкции их подразделяют на два типа: цельные винты (ступица с лопастями изготовляется совместно) и винты со съемными лопастями , применяемые на судах, плавающих во льдах. Такие винты называются винтами фиксированного шага, а винты, имеющие механизмы, поворачивающие лопасти в ступице и изменяющие шаг винта, называются винтами регулируемого шага.
Шагом винта называется путь в направлении оси, который проходит любая точка поверхности винта за один его оборот.
Гребные винты фиксированного шага - ВФШ (рис. 27) изготовляют цельными (одной деталью), литыми, сварными или штампованными, и они состоят из следующих основных элементов: ступицы , представляющей собой втулку, наеаживаемую на конус шейки гребного вала, и лопастей (от 3 до 6), радиально расположенных на ступице. Нижняя часть лопасти, соединяющая ее со ступицей, называется корнем лопасти; верхняя часть - вершиной или концом; поверхность лопасти, обращенная в сторону корпуса судна, носит название засасывающей поверхности, обратная поверхность - нагнетающей, которая в большинстве случаев представляет собой правильную винтовую поверхность. Пересечение этих двух поверхностей образует кромки лопастей.
Рис. 27. Гребной винт фиксированного шага (ВФШ) и схема создания упорного давления элементарной площадкой лопасти винта.
Диаметром гребного винта D называется диаметр окружности, описанной вершиной лопасти. Диаметр винта крупных судов доходит до 6,0 м и более.
Применяют гребные винты правого и левого вращения, их различают по общим правилам: если винт завинчивается вращением по часовой стрелке, то он называется винтом правого вращения, а если против часовой стрелки - винтом левого вращения.
При вращении винта его лопасти отбрасывают массы воды в одну из сторон. Реакция этой воды воспринимается нагнетающей поверхностью лопасти, создающей упор винта, который через ступицу и гребной вал передается на упорный подшипник, преобразуясь в силу, движущую судно.
Чтобы понять, как возникает упорное движение при вращении винта (рис. 27), рассмотрим те силы, которые действуют при этом на элементарной площадке его лопасти, двигающейся по окружности со скоростью v 0 И одновременно перемещающейся вместе с судном со скоростью v 1 . Угол а, образовавшийся между результирующей этих сил v и хордой рассматриваемой элементарной площади лопасти, будет углом атаки, создающим на ней подъемную силу R. Если разложить эту силу на составляющие, то одна составляющая -сила Р, действующая по направлению движения судна, и будет силой-упора, а вторая-сила T, действующая по окружности в сторону, обратную вращению винта, создает момент относительно его оси, который преодолевается судовым двигателем.

Рис. 28. Гребной винт регулируемого шага (ВРШ) с поворотношатунным механизмом изменения шага.
1 - лопасти винта; 2- ступица; 3- гребной вал; 4 - ползун со штангой;
5 - палец шатуна; 6 -подшипник лопастной заделки; 7 - обтекатель
винта.
Гребной винт регулируемого шага (ВРШ) имеет конструкцию, обеспечивающую поворот лопастей в ступице во время работы винта на ходу судна из поста управления, расположенного в рубке. При повороте лопастей, осуществляемом механизмом по многообразным кинематическим схемам (одна из которых-поворотно-шатунная-приведена на рис. 28), изменяется шаг винта, отчего изменяется и величина создаваемого им упора, увеличивающего или уменьшающего скорость хода, и направление движения судна, при этом число оборотов, мощность главной машины и направление ее вращения остаются неизменными.
Использование винтов регулируемого шага допускает применение на судах нереверсивных главных машин с упрощенной системой обслуживания, что сокращает износ их цилиндров примерно на 30-40% (возникающий у реверсивных машин от частого изменения режима работы и направления вращения), позволяет полнее использовать мощность машин и поддерживать высокое значение к. п. д. винта.

Рис. 29. Крыльчатый движитель: а - конструктивная схема; б -
размещение движителя на судне.
1 - несущий диск; 2 - поворотные лопасти; 3 - ведомая шестерня, приводящая во вращение диск; 4 - гидравлическое устройство управления маятниковым рычагом; 5 - маятниковый рычаг, изменяющий положение лопастей
вокруг своей оси; 6 - гребной вал с ведущей конической шестерней.
Суда с ВРШ обладают гораздо более высокими маневренными качествами, чем суда с ВФШ.
Крыльчатый движитель (рис. 29) представляет собою конструктивное устройство, состоящее из горизонтально вращающегося цилиндра с вертикально расположенными на нем 6-8 лопастями мечевидной, обтекаемой формы, поворачивающимися вокруг своих осей маятниковым рычагом, управляемым из рулевой рубки.
При вращении диска на лопастях, как на крыле, возникает подъемная сила, составляющая которой создает упорное давление. При повороте лопастей изменяется величина упора и его направление, что дает возможность варьировать направление движения судна без помощи руля (на судне с этим движителем руль не устанавливается), а также величину упора движителя от «Полного вперед» до «Полного назад» или останавливать судно, не изменяя скорости и направления вращения (без реверса) главной силовой установки.
К. п. д. крыльчатого движителя почти равен к. п. д. гребного винта, но крыльчатый движитель значительно сложнее по конструкции. Выступающие лопасти часто ломаются. Однако в последнее время этот движитель находит все более широкое применение, обеспечивая судам хорошую маневренность, позволяющую им свободно работать в узкостях.
Водометный движитель относится к серии водопроточных движителей. Современные водометные движители делают трех типов: с выбросом водяной струи в воду, в атмосферу и с полуподводным выбросом .
Гребной винт работает как насос, засасывающий воду в канал через трубу, проходящую в днище корпуса впереди винта. Для защиты от попадания на винт посторонних предметов в начале канала укрепляется защитная решетка.
Для уменьшения потерь от закручивания гребным винтом водного потока и повышения к. п. д. движителя за винтом устанавливается контрпропеллер. Направление хода судна изменяется перекладкой реверс-руля.
Коэффициент полезного действия такого движителя составляет только 35-45%, а отсутствие всяких выступающих частей в подводной части судна обеспечивает ему большую проходимость на мелководье, в узкостях и на засоренных фарватерах. Для судна с таким движителем не являются препятствием даже плавающие предметы, через которые оно свободно переходит.
Перечисленные преимущества водометного движителя сделали его применение особенно удобным на речных судах, в первую очередь на лесосплаве.
В последние годы водометные движители стали применяться и на быстроходных судах, таких, как суда на подводных крыльях, развивающие скорость хода до 95 км/час.
Использование современных паровых и газовых турбин позволяет успешно применить водометные движители на крупных морских судах, где по расчетам пропульсивный к. п. д. может достичь около 83%, что на 11% выше пропульсивного коэффициента гребного винта, запроектированного для того же судна.
К недостаткам судов с этим движителем следует отнести потери судном грузоподъемности на величину веса прокачиваемой воды и потери объема внутренних помещений, занимаемого каналом.
Механические двигатели на судах могут приводить в действие следующие движители
1 У нас в стране суда с таким парусным вооружением называют кэт га-фельный, бермудский и т. д. - прим. науч. ред.
2 Движитель - устройство, которое, используя работу двигателя, создает силу, способную перемещать судно в заданном направлении.
Гребные ВИНТЫ. Винты, размещаемые в кормовой части судна, постоянно находятся под водой. Гребные валы винтов параллельны конструктивной ватерлинии (КВЛ)Винты могут иметь от двух до пяти лопастей, неподвижных или поворотных (регулируемого шага) (рис. 56). Наконец, суда могут быть с одним, двумя, тремя или четырьмя винтами, расположенными симметрично относительно диаметральной плоскости.
Считается, что суда с гребными винтами и обычным корпусом не могут развить скорость более 40 уз, так как коэффициент полезного действия винтов невелик. Только с появлением новых типов судов, например с подводными крыльями или на воздушной подушке, удалось превысить эту скорость.
Гребные колеса - это специальные колеса с лопастями, расположенными по окружности; лопасти - плицы - могут быть неподвижными или поворотными (рис. 57). Гребные колеса, как правило два, устанавливают по бортам судна, однако встречаются суда и с одним гребным винтом, расположенным на корме (например, некоторые американские речные суда). В воде находится только нижняя часть гребных колес.
Крыльчатый движитель начал входить в употребление только в последние годы. Он был предложен в 1926 г. австрийцем Эрнестом Шнайдером и после пятилетних испытаний построен немецкой фирмой Войта. С 1939 г. его начинают применять в основном на буксирах, понтонах и речных судах.
Движитель представляет собой диск, горизонтально вращающийся внутри обшивки, с четырьмя выступающими лопастями, которые могут поворачиваться относительно своих вертикальных осей. Лопасти можно располагать и эксцентрично; изменяя эксцентриситет и углы установки лопастей, создают упор движителя в любом направлении (рис. 58). Поэтому такой движитель заменяет руль и одновременно обеспечивает судну большую маневренность: возможно движение вперед, назад, в сторону и дал<е поворот судна на месте.
Водометный движитель. Ведутся разработки новых движителей. Широкое применение, возможно, найдет водометный движитель, первые попытки использования которого относятся к прош-. лому веку. Эксперименты проводились в 1866 г. в Англии и в 1885 г. в России, но только в 1940 г. в Советском Союзе и в США они закончились успешно.
Принцип работы движителя состоит в том, что вода отбрасывается Б сторону, противоположную желаемому направлению движения судна. Для этого вода засасывается через отверстие в днище при помощи насоса и с большой скоростью через сопло выбрасывается наружу.При использовании этого движителя можно обходиться без руля, так как сопло поворачивается в любую сторону (рис. 59, 60).
" КВЛ - ватерлиния, соответствующая проектной осадке судна.

Рис. 62. Судно на воздушной подушке.
Воздушные винты, к водным транспортным средствам с механическим двигателем относят и глиссеры, приводимые в движение воздушным винтом. Эти суда, как правило, имеют плоское днище, их часто используют на мелководьях, в болотах, озерах, лагунах и т. д. (рис. 61).
По принципу поддержания суда классифицируют на:
водоизмещающие, у которых вес уравновешен силами воды, действующими на погруженную в воду часть судна, т. е. -силами гидростатического давления;
суда с динамическими принципами поддержания (глиссирующие, суда на воздушной подушке и на подводных крыльях, экра-нопланы).
Суда на воздушной подушке. Эти транспортные средства называть судами следует с оговоркой, так как они могут двигаться как по суше, так и по воде, но могут сыграть вполне определенную роль в развитии будущих мор- ских средств.
в Англии такие суда называют Hovercraft - парящими средствами передвижения, а в Америке - Ground Effect Maschine - машинами эффекта поверхности.
При движении такие суда опираются на воздушную подушку, давление которой уравновешивает вес транспортного средства и удерживает его парящим над землей или водой. Таким образом, судну приходится преодолевать только сопротивление воздуха, что позволяет достичь высоких скоростей.
Существуют различные способы создания воздушных подушек, в основе которых лежит один принцип: воздух специальными вентиляторами нагнетается под днище транспортного средства. Обычно применяют один или несколько воздушных винтов или пропускают часть воздушной струи от компрессоров через соответствующие сопла, благодаря чему судно движется. В настоящее время проводятся эксперименты по созданию других транспортных средств, работающих по принципу воздушной подушки (риє. 62).
Суда на подводных крыльях. В настоящее время этим судам предсказывают большое будущее. В них в определенном смысле сконцентрирован опыт и современные достижения техники.
Благодаря опытам Кроко и Форлакини первое такое судно было испытано на озере Комо в 1920 г.
Судно на подводных крыльях во время движения не испытывает гидродинамического давления, так как в воду погружены олько небольшие крылья особого профиля, а весь корпус полностью находится над водой.

Различают суда с наклонными крыльями, часть которых находится в воде, а часть над водой (рис. 63), и суда с постоянно погруженными подводными крыльями (рис. 64).
Движение этих судов происходит при помощи или обычных гребных винтов, или воздушных винтов, или водометного движителя. Высокие скорости судов на подводных крыльях свидетельствуют об их большой перспективности и о правильности выбранного конструкторами пути.
«СУДОВЫЕ ДВИЖИТЕЛИ Чтобы судно могло двигаться с постоянной скоростью, к нему нужно приложить движущую силу, равную силе...»
КРАТКИЕ ПОЯСНЕНИЯ ПО ЗАДАНИЯМ 7-8 КЛАССОВ
Задание 3 – движители
СУДОВЫЕ ДВИЖИТЕЛИ
Чтобы судно могло двигаться с постоянной скоростью, к нему нужно
приложить движущую силу, равную силе сопротивления при этой скорости и
противоположно направленную. В отдельных случаях эта сила создается
буксированием, но чаще всего – специальными устройствами, которые
называются судовыми движителями. В соответствии со сложившимися традициями термин «судовые движители», как и ряд других подобных, означает как указанные устройства, так и науку (раздел теории корабля), их изучающую. Судоходство на Земле существует уже несколько тысячелетий, но во времена парусных (и весельных) судов науки о ходкости судов не было. Скорость парусных судов зависела от скорости ветра, для гребных судов также не требовались какие-либо расчеты. Настоятельная необходимость выполнения расчетов ходкости возникла лишь тогда, когда на судах стали применяться механические двигатели (паровые машины).
По принципу действия движители разделяют на активные, к которым относят паруса, непосредственно преобразующие энергию ветра в поступательное движение судна, и реактивные - все остальные, так как создаваемое ими упорное давление получается в результате реакции масс воды, отбрасываемой в сторону, противоположную движению судна.
Видимо, первыми движителями, которые использовались на плотах и подобных им простейших плавсредствах, были шест и весло. Суда древности были преимущественно весельными, причем у крупнейших из них весла располагались в три ряда, их общее число достигало 300, длина – 15 м, на одном весле работало до 7 чел. Скорость таких судов была около 5 уз. Пика своего расцвета весельные суда достигли много веков назад. В настоящее время весла используются в качестве основного движителя лишь на спортивных судах, рабочих и спасательных шлюпках и других мелких судах.
Другим древним движителем был парус, иногда в комбинации с веслами. Парусные суда оказались более совершенными, они использовали энергию внешней среды – воздуха, не требуя размещения большого числа гребцов. Первые парусники могли двигаться по ветру, но по мере совершенствования парусного вооружения люди научились, двигаясь галсами, перемещаться в требуемом направлении, независимо от направления ветра. Наивысшего расцвета парусные суда достигли примерно в конце XIX в., их скорость при благоприятном ветре достигала 20 уз. Но появление и развитие механических установок на судах привело к постепенному переходу от парусных судов к пароходам. Парус сохранился на спортивных, учебных судах в качестве основного, на промысловых, некоторых исследовательских и т.п. судах – в качестве вспомогательного движителя. В последние десятилетия в мировом судостроении наблюдается рост интереса к парусам как основному или, чаще, дополнительному типу движителей.
Этот интерес обусловлендвумя главными причинами:
возможностью экономии топлива при высоких ценах на него и экологической чистотой. Применение парусного вооружения позволяет значительно уменьшить мощность главного двигателя (дизеля) без существенной потери скорости. Достижения современной науки позволяют механизировать установку и уборку парусов, управление ими с целью получения наивысшей скорости хода в требуемом направлении, снизить массу при достаточной прочности и долговечности. В различных судостроительных странах, а также в России и Украине, выполнены разработки парусного вооружения судов, в том числе большого водоизмещения, однако о широком использовании парусов на транспортном флоте говорить преждевременно.
В глубокой древности, еще до нашей эры, было изобретено гребное колесо, которое приводилось во вращение животными (быками). Но колесные суда были вытеснены парусными. На новом уровне гребные колеса возродились в самом начале XIX в. (на судне «Клермонт» в 1802 г.; в России первым парусным судном считается построенная в 1815 г. «Елизавета»).
Первые гребные колеса имели обод и неподвижные лопасти – плицы; КПД колес был сравнительно мал, глубина погружения – в несколько раз меньше диаметра. В 1829 г. было предложено колесо с поворотными плицами, что позволило повысить КПД и уменьшить диаметр колес; повышение оборотов двигателей (паровых машин) ведет к уменьшению их размеров.
Гребное колесо - вид движителя, используемый с древних времен для приведения в движение судов.
Представляет собой большое колесо, снабженное лопастями (плицами), которые погружаются в воду.
Гребное колесо по конструкции аналогично водяному колесу, с той лишь разницей, что не вода приводит колесо в движение, а колесо используется для движения.
Существовало две основные разновидности гребных колёс:
Кормовые, расположенные за кормой судна;
Бортовые, попарно размещавшиеся с бортов корабля.
Роберт Фултон на плавбатарее «Demologos» применил оригинальное решение - спрятал колесо диаметром 5 метров между двумя полукорпусами, защищая его тем самым от артиллерийского огня. Хотя первый в мире паровой боевой корабль развивал среднюю скорость 5 узлов, а максимальную 7, он был закончен уже после окончания войны за независимость США и после смерти своего создателя.
Позднее, уже в годы Гражданской войны, федеральным правительством строились концептуально очень похожие речные броненосцы.
Гребные колёса, приводимые в движение с помощью паровых машин, были преобладающими двигательными установками в военном флоте в XIX веке. К концу века, гребные колеса были вытеснены более эффективными гребными винтами.
Рис. 1. Пароход «Н. В. Гоголь» - старейшее (1911 г.) российское пассажирское судно, находящееся в эксплуатации (2014 г.) Движитель - два бортовых колеса.
Недостатки Основная проблема при использовании гребного колеса - при сильной бортовой качке правое и левое гребное колесо попеременно полностью выходит из воды, судно рыскает, делая нормальное движение невозможным. Также на волнении колеса подвергались большим ударным нагрузкам, выводившим их из строя;
Низкий коэффициент полезного действия - около 30 %; КПД гребного винта - до 70 %;
Топлива), чем у винта;
осадки судна;
Применение гребных колес требовало размещения машины выше ватерлинии, что также уменьшало доступные полезные объёмы, а на флоте - увеличивало уязвимость машины;
Бортовые колёса требовали больших обносов, увеличивавших габариты судна, уменьшавших полезную площадь палубы;
Кормовые колёса менее эффективны гидродинамически, увеличивая сопротивление корпуса, из под которого они как бы откачивали воду.
Вместе с тем, гребные колёс, что было удобно для буксиров, а также позволяло им иметь меньшую осадку.
Именно поэтому в СССР строительство речных колёсных буксиров (но уже теплоходов, с дизельными двигателями) продолжалось до 1991 года (буксиры-толкачи серии БТК).
Прогулочные водные велосипедыкатамараны приводятся в движение гребным колесом с педальным приводом.
Лопасти гребного колеса называются, как правило, изготавливаются из деревянных досок, с тем расчётом, чтобы при поломке их можно было легко отремонтировать.
Трансмиссия парохода с бортовыми гребными колёсами была очень простой: паровая машина непосредственно вращала вал с насаженными на него колёсами, не было необходимости применятьредуктор.
Наиболее распространенный, эффективный и сравнительно простой движитель – гребной винт.
Идея судового гребного винта в виде шнека, подобно применявшемуся в древности винту Архимеда (для перекачки жидкостей), впервые возникла у Леонардо да Винчи в XV в., но в ту пору она не нашла применения. В 1752 г. винт в виде двухзаходного червяка предложил Д.
Бернулли, но КПД такого движителя оказался невелик. Как указывают в литературе, случай помог усовершенствовать конструкцию винта: одно судно, оборудованное деревянным винтом, коснулось им грунта, значительная часть винта отломилась и всплыла, но, к удивлению экипажа судна, оно увеличило ход. С тех пор было предложено множество усовершенствований винтов. Менялись их размеры, формы контура и сечений лопастей и другие характеристики. Некоторые усовершенствования продолжают появляться до сих пор.
В зависимости от конструкции их подразделяют на два типа: цельные винты (ступица с лопастями изготовляется совместно) и винты со съемными лопастями, применяемые на судах, плавающих во льдах. Такие винты называются винтами фиксированного шага, а винты, имеющие механизмы, поворачивающие лопасти в ступице и изменяющие шаг винта, называются винтами регулируемого шага. Шагом винта называется путь в направлении оси, который проходит любая точка поверхности винта за один его оборот.
Гребные винты фиксированного шага - ВФШ изготовляют цельными (одной деталью), литыми, сварными или штампованными, и они состоят из следующих основных элементов: ступицы, представляющей собой втулку, насаживаемую на конус шейки гребного вала, и лопастей (от 3 до 6), радиально расположенных на ступице. Нижняя часть лопасти, соединяющая ее со ступицей, называется корнем лопасти; верхняя часть - вершиной или концом; поверхность лопасти, обращенная в сторону корпуса судна, носит название засасывающей поверхности, обратная поверхность - нагнетающей, которая в большинстве случаев представляет собой правильную винтовую поверхность. Пересечение этих двух поверхностей образует кромки лопастей.
Рис. 2. Гребные винты: а - гребной винт с неподвижными лопастями;
b - винт регулируемого шага; с - гребной винт в насадке; d - соосные гребные винты.
Диаметром гребного винта D называется диаметр окружности, описанной вершиной лопасти. Диаметр винта может достигать 9 м, а масса - 50 т. Гребные винты регулируемого шага имеют меньший диаметр.
Характерной величиной гребного винта является шаг (рис. 2,а). Его теоретическое значение, т. е. без учета скольжения, зависит от угла атаки лопасти гребного винта.
Для достижения хорошего взаимодействия между главным двигателем и гребным винтом необходимо, чтобы параметры и особенно шаг винта имели определенные значения. Оптимальное взаимодействие будет достигнуто лишь при определенном состоянии нагрузки судна и при определенных погодных условиях (ветер, волнение и т. д.). Если эти значения отклоняются от заданных, то взаимодействие двигателя и гребного винта не приносит результата, заложенного в проекте. На практике это означает, что взаимодействие двигателя и относящегося к нему гребного винта будет наиболее эффективным, например, при полной нагрузке судна и при хорошей погоде.
Применяют гребные винты правого и левого вращения, их различают по общим правилам: если винт завинчивается вращением по часовой стрелке, то он называется винтом правого вращения, а если против часовой стрелки - винтом левого вращения. При вращении винта его лопасти отбрасывают массы воды в одну из сторон. Реакция этой воды воспринимается нагнетающей поверхностью лопасти, создающей упор винта, который через ступицу и гребной вал передается на упорный подшипник, преобразуясь в силу, движущую судно.
На судах, работающих в изменяющихся условиях, таких как буксиры или рыболовные суда (свободный ход, ход с тралом), движитель должен быть приспособлен к соответствующим условиям работы. Вместе с тем стало бы возможным одновременное использование полной мощности приводного двигателя при различных состояниях его нагрузки.
Лопасти винта фиксированного шага отлиты вместе со ступицей или прочно привинчены к ней (см. рис. 2,а).
Изменять шаг можно на гребных винтах регулируемого шага - ВРШ (рис. 2,b). Гребной винт регулируемого шага (ВРШ) имеет конструкцию, обеспечивающую поворот лопастей в ступице во время работы винта на ходу судна из поста управления, расположенного в рубке. При повороте лопастей, осуществляемом механизмом по многообразным кинематическим схемам, изменяется шаг винта, отчего изменяется и величина создаваемого им упора, увеличивающего или уменьшающего скорость хода, и направление движения судна, при этом число оборотов, мощность главной машины и направление ее вращения остаются неизменными. Использование винтов регулируемого шага допускает применение на судах нереверсивных главных машин с упрощенной системой обслуживания, что сокращает износ их цилиндров примерно на 30-40% (возникающий у реверсивных машин от частого изменения режима работы и направления вращения), позволяет полнее использовать мощность машин и поддерживать высокое значение к. п. д.
винта. Суда с ВРШ обладают гораздо более высокими маневренными качествами, чем суда с ВФШ. Суда с ВРШ обладают гораздо более высокими маневренными качествами, чем суда с ВФШ.
Вначале ВРШ применяли только на буксирах, рыболовных и специальных судах, и только позднее их начали устанавливать на судах торгового флота. За счет установки ВРШ достигаются большая экономичность энергетических установок, возможность использования полной мощности двигателя при различной нагрузке, а также возможность применения нереверсивных ДВС или паровых турбин без турбин заднего хода. К преимуществам следует также отнести и возможность осуществления заднего хода при полной мощности двигателя.
Иногда на судах (особенно на судах речного флота) гребной винт устанавливают в насадке (см. рис. 2,с). Такая конструкция позволяет улучшить условия работы гребного винта и повысить КПД.
Преобладающее число судов имеет только один гребной винт, устанавливаемый в диаметральной плоскости судна. Встречаются также двухвинтовые суда, которые приводятся в движение либо от двух малооборотных, либо от четырех среднеоборотных дизелей, причем в последнем случае один гребной винт приводится в движение двумя двигателями. В редких случаях строятся трехвинтовые суда, например торпедные катера, на которых два бортовых движителя, приводятся в движение от высокооборотных дизелей через редукторную передачу, а средний гребной винт - от газовой турбины. Некоторые большие пассажирские суда и боевые корабли, например авианосцы, снабжаются четырьмя симметрично расположенными гребными винтами.
В условиях постоянно растущих мощностей главных двигателей требуются гребные винты очень больших диаметров, что приводит к технологическим и производственным трудностям. Чтобы противодействовать этому и улучшить КПД, пытаются устанавливать движители, вращающиеся в противоположных направлениях (см. рис. 2,d). В этом случае необходимы сложные устройства, такие как полые гребные валы и специальные редукторные передачи.
В середине XVII в. появились первые водометные движители.
Водометный движитель представляет собой систему водопроточных каналов (в частном случае – один канал), расположенных внутри корпуса судна, по которым перемещается забортная вода с помощью специального насоса, чаще всего осевого (винт в трубе). С помощью заслонок поток воды направляется в те или иные каналы (в случае одного канала изменяется направление движения струи, выходящей из канала в корме), что позволяет изменять направление движения судна. К характерным особенностям водометных движителей можно отнести хорошую защищенность рабочего органа (расположенного в канале внутри корпуса; входное отверстие канала снабжено решеткой, которая препятствует попаданию крупных предметов в канал) и прекрасные маневренные качества (возможность двигаться передним и задним ходом, разворачиваться почти на месте благодаря соответствующей установке заслонок). Но эти движители отличаются большой массой (в которую входит система водопроточных каналов с водой внутри корпуса), занимают большой объем, затрудняя размещение полезного груза, обладают сравнительно невысоким КПД. Строго говоря, КПД водометного движителя – понятие достаточно условное, поскольку упор такого движителя создается на корпусе и не всегда удается точно разделить силы сопротивления и упора. Грубо ориентировочно, КПД обычного водометного движителя может составлять примерно 30 %. Долгое время водометные движители мало применялись на судах. Считалось, что область их применения ограничивается сравнительно тихоходными судами, плавающими на мелководном или засоренном фарватере (например, такие суда использовались на лесосплаве). Но примерно с середины XX в. их популярность стала возрастать. Этому способствовали два обстоятельства.
Во-первых, вместо развитой системы водопроточных каналов было предложено устраивать один короткий канал в кормовой оконечности судна, обеспечивая управление судном с помощью заслонок, отклоняющих струю движителя в нужную сторону.
Во-вторых, было показано, что КПД водометного движителя на быстроходных судах может достигать 60 % и более, тогда как у обычных гребных винтов в этих условиях он может снижаться из-за кавитации. Сравнительно недавно был предложен своеобразный водометный движитель для подводных лодок, торпед и других плавучих объектов, имеющих кормовую оконечность в форме тела вращения. Этот движитель представляет собой ряд лопастей, вращающихся вместе с кольцом, установленным заподлицо с наружной обшивкой. Снаружи установлено кольцо типа направляющей насадки; от гребного винта в насадке эта конструкция отличается тем, что винт в насадке располагается за пределами корпуса.
Современные водометные движители делают трех типов: с выбросом водяной струи в воду, в атмосферу и с полуподводным выбросом. Гребной винт работает как насос, засасывающий воду в канал через трубу, проходящую в днище корпуса впереди винта. Для защиты от попадания на винт посторонних предметов в начале канала укрепляется защитная решетка.
Для уменьшения потерь от закручивания гребным винтом водного потока и повышения к. п. д. движителя за винтом устанавливается контрпропеллер.
Направление хода судна изменяется перекладкой реверс-руля. Отсутствие всяких выступающих частей в подводной части судна обеспечивает ему большую проходимость на мелководье, в узкостях и на засоренных фарватерах. Для судна с таким движителем не являются препятствием даже плавающие предметы, через которые оно свободно переходит.
Перечисленные преимущества водометного движителя сделали его применение особенно удобным на речных судах, в первую очередь на лесосплаве. В последние годы водометные движители стали применяться и на быстроходных судах, таких, как суда на подводных крыльях, развивающие скорость хода до 95 км/час. Использование современных паровых и газовых турбин позволяет успешно применить водометные движители на крупных морских судах, где по расчетам пропульсивный к. п. д. может достичь около 83%, что на 11% выше пропульсивного коэффициента гребного винта, запроектированного для того же судна.
К недостаткам судов с этим движителем следует отнести потери судном грузоподъемности на величину веса прокачиваемой воды и потери объема внутренних помещений, занимаемого каналом.
Рис. 3. Схема водометного движителя
Около 1930 г. были предложены крыльчатые движители. Эти движители состоят из барабана, установленного внутри корпуса заподлицо с днищем и имеющего вертикальную или почти вертикальную ось вращения с вертикально расположенными на нем 6-8 лопастями мечевидной, обтекаемой формы, поворачивающимися вокруг своих осей маятниковым рычагом, управляемым из рулевой рубки. При вращении барабана лопасти совершают колебательные движения, в результате чего создается упор, направление которого может быть произвольным, а величина – изменяться от нуля до максимального значения. Крыльчатый движитель одновременно является прекрасным средством управления. Судно, оборудованное двумя крыльчатыми движителями, расположенными в оконечностях, может двигаться передним или задним ходом, лагом, разворачиваться на месте. Но такой движитель сравнительно сложный и громоздкий, требует наличия протяженного участка плоского днища в районе установки, неудобен подвод мощности к нему, при скоростях свыше 20 уз возникает кавитация. К. п. д.
крыльчатого движителя почти равен к. п. д. гребного винта, но крыльчатый движитель значительно сложнее по конструкции. Выступающие лопасти часто ломаются. Однако в последнее время этот движитель находит все более широкое применение, обеспечивая судам хорошую маневренность, позволяющую им свободно работать в узкостях.
Крыльчатый движитель в основном используется на портовых буксирах и лоцманских судах, а также на судах портовой службы. Мощность подобных установок невелика: максимально она составляет 2200 кВт.
Рис. 4. Крыльчатый движитель: а - принцип действия; b - движитель Фойта-Шнейдера (вид сбоку); с - движитель Фойта Шнейдера (вид сверху); d - буксир с движителем Фойта-Шнейдера в носовой части судна;
е - буксир с движителем Фойта-Шнейдера в кормовой части судна.
В начале ХХ в. появились башенные движители («роторы Флеттнера») в виде цилиндрических башен с вертикальной осью вращения, которые приводились во вращение маломощными двигателями, установленными под верхней палубой. Принцип работы ротора Флеттнера основан на эффекте Магнуса, который заключается в появлении подъемной силы на цилиндре, вращающемся в потоке жидкости или газа. Величину этой силы можно рассчитать по формуле Жуковского: P v = l,8 где – плотность среды (воздуха); v – скорость набегающего потока (ветра); – циркуляция скорости на контуре профиля (цилиндра), в данном случае равная произведению длины окружности ротора на линейную скорость его поверхности; l – длина (высота ротора). Упор ротора направлен перпендикулярно скорости ветра. Эти движители эффективнее парусов (мощность двигателя в десятки раз меньше мощности, «извлекаемой из воздуха»), но не могут убираться, чем представляют опасность при сильном ветре. Вопилова О.А. 2014-2015 год В дошкольном возрасте происходит становление личности ребенка, закладываются основы знаний, понятий, представлений. Все возрастающий объем информации, которую дети должны усваивать не механически, а осмысленно, требует более совершенных форм, методов и приемов обучения и воспитания. В связи с этим особенно...»
« Федерального медикобиологического агентства”, зав. курсом государственных закупок в здравоохранении при Кафедре общественного здоровья и здравоохранения, правоведения и информатики Суворов Георгий Николаевич, старший преподаватель курса государственных закупок в здравоохранении при Кафедре общественного здоровья и здравоохранения,...»
«Применение методики расчета фотографии рабочего времени при реализации линейной телемеханики Бабаев А.С., Дронюк С.И. Томский промышленно – гуманитарный колледж Томск, Россия Application of the method of calculation of photos of work in the implementation of linear telemechanics Babaev Yu. S., Dronyuk S.I. Tomsk College of Industrial and Humanities Tomsk, Russia Департамент профессиональногообразования Томской области Областное государственное бюджетное образовательное учреждение среднего...»
«УДК 631.4 АГРЕГАТНОЕ СОСТОЯНИЕ ПОЧВ РАЗНОЙ СТЕПЕНИ ГИДРОМОРФИЗМА В ХОЛМИСТО-МОРЕННЫХ АГРОЛАНДШАФТАХ О. А. Анциферова, О. В. Васильева, О. А. Янчевская AGGREGATE COMPOSITION OF SOILS OF DIFFERENT HYDROMORPHIC DEGREE IN HILLY-MORAINE CULTIVATED LANDS О. А. Antsiferova, O. V. Vasilyeva, O. A. Yanchevskaya Исследования проведены в июле-августе 2013 г. в агроландшафтах Зеленоградского района Калининградской области в пределах Самбийской холмисто-моренной равнины. Изучен агрегатный состав почв на...»
« университет информационных технологий, механики и оптики. Институт холода и биотехнологий В статье рассмотрены различия между жизненными циклами продукта и жизненным циклом инновации. Ключевые слова: инновации, инновационный процесс, модели инновационного процесса. Возрастающей роли инновационных процессов, которые свойственны...»
«Теплофизика и аэромеханика, 2009, том 16, № 3 УДК 532.546:534.1 Взаимодействие акустических волн с пористым слоем* А.А. Губайдуллин, О.Ю. Болдырева, Д.Н. Дудко Тюменский филиал Института теоретической и прикладной механики им. С.А. Христиановича СО РАН E-mail: [email protected] Исследуется взаимодействие звукового импульса с пористым слоем. При этом возможно наличие преграды, экранируемой слоем, а также зазора между пористым слоем и преградой. Предложена методика расчета в линейном приближении...»
«Л.А. Церникель ПРОГРАММА РАЗВИТИЯ «НАША НОВАЯ ШКОЛА» ВЕДУЩИЙ МЕХАНИЗМ УПРАВЛЕНИЯ В СОВРЕМЕННОМ ОБРАЗОВАТЕЛЬНОМ УЧРЕЖДЕНИИ Барнаул 2013 МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Алтайская государственная педагогическая академия» Региональная межвузовская лаборатория «Управление развитием образования» (АлтГПА)» ПРОГРАММА РАЗВИТИЯ «НАША НОВАЯ ШКОЛА» ВЕДУЩИЙ МЕХАНИЗМ УПРАВЛЕНИЯ В СОВРЕМЕННОМ...»
2016 www.сайт - «Бесплатная электронная библиотека - Научные публикации»
Материалы этого сайта размещены для ознакомления, все права принадлежат их авторам.
Если Вы не согласны с тем, что Ваш материал размещён на этом сайте, пожалуйста, напишите нам , мы в течении 1-2 рабочих дней удалим его.